

һ�N���ڣͣ������f(xi��)�h�IJ�����ҺλӋģ�K�O(sh��)Ӌ
- ժҪ�����ڣͣ������f(xi��)�h�O(sh��)Ӌ��һ�N������ҺλӋģ�K�O(sh��)Ӌ�����@һģ�K�еģң�485�ӿ��·�M���˽�B���������@һ������ҺλӋģ�K�O(sh��)Ӌ��ͨ�ŷ�ʽ������(n��i)�������M���˽�B�����M����ݔ��ݔ���yԇ�������O(sh��)Ӌ�IJ�����ҺλӋģ�K�O(sh��)Ӌ��(y��ng)����ʮ�ֻ��_늚���ƣ�ȡ�������õ�Ч����
�a(ch��n)ƷԔ��(x��)
ժҪ�����ڣͣ������f(xi��)�h�O(sh��)Ӌ��һ�N������ҺλӋģ�K�O(sh��)Ӌ�����@һģ�K�еģң�485�ӿ��·�M���˽�B���������@һ������ҺλӋģ�K�O(sh��)Ӌ��ͨ�ŷ�ʽ������(n��i)�������M���˽�B�����M����ݔ��ݔ���yԇ�������O(sh��)Ӌ�IJ�����ҺλӋģ�K�O(sh��)Ӌ��(y��ng)����ʮ�ֻ��_늚���ƣ�ȡ�������õ�Ч����
�� �O(sh��)Ӌ����
���y(t��ng)������ҺλӋϵ�y(t��ng)�У����ÿɾ�������������Ʋ��M�(q��)�������ŷ��(q��)�������M�����F(xi��n)�\�ӿ��ơ����ǣ��ɾ�����������^�y���F(xi��n)��(f��)�s���\��܉�E���ơ��S��Ƕ��ʽ���g(sh��)��څ���ƣ�����ң�̎������������ҺλӋ�б��V����(y��ng)�á��P�ߑ�(y��ng)�ã��ңͣӣԣ�3����407оƬ�����ڣͣ������f(xi��)�h�O(sh��)Ӌ��һ�N������ҺλӋģ�K�O(sh��)Ӌ�ۣ������ݡ��@һģ�K���Д�(sh��)����ݔ��ɼ�����(sh��)����ݔ�����ƺ����}�_ݔ�����ܣ��܉�ͨ�^��(n��i)����������Ʋ��M�(q��)�������ŷ��(q��)���������F(xi��n)��(f��)�s���\��܉�E���ơ�
�� Ӳ���O(sh��)Ӌ
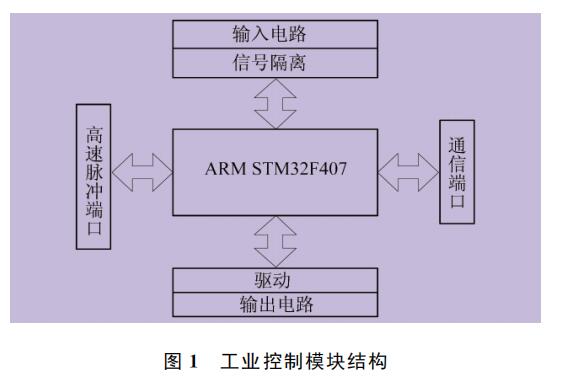
���O(sh��)Ӌ�IJ�����ҺλӋģ�K�O(sh��)Ӌ�Y(ji��)��(g��u)��D����ʾ�����ã��ңͣӣԣ�3����407оƬ������ƺ��ģ���(y��ng)�ãͣ���485оƬ���F(xi��n)�ң�485ͨ�ţ�3�ݣ���(y��ng)�ãţ�357оƬ���F(xi��n)ݔ����̖��ݔ����̖�ĸ��x�ۣݡ��@һ������ҺλӋģ�K�O(sh��)Ӌ���Խ��գ���λ�_�P(gu��n)��ݔ����̖������7·ݔ�����܉�?q��)��F(xi��n)4·�����}�_���ơ�
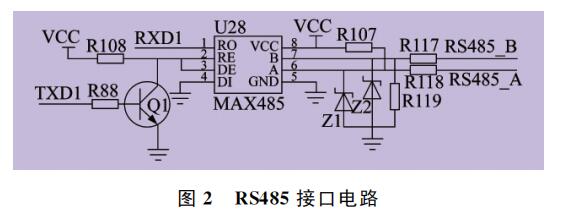
�������ң�485�ӿ��·
���O(sh��)Ӌ�IJ�����ҺλӋģ�K�O(sh��)Ӌ�Ѓ�·�ң�485ͨ�Žӿڡ��ң�485�ӿ��·���ãͣ���485оƬ����D����ʾ���·���l(f��)�͔�(sh��)��(j��)�r���ԣأģ�����ƽ�����O�ܣѣ���(d��o)ͨ���ңŞ���ƽʹ�ܣ��ң϶˽��Ք�(sh��)��(j��)���ͣ���485оƬ̎�ڽ��ՠ�B(t��i)���·�l(f��)�͔�(sh��)��(j��)�r���ԣأģ��ɸ��ƽ׃?y��u)���ƽ���r�g�L���cͨ���������P(gu��n)�����O�ܣѣ���ֹ���ͣ���485оƬ̎�ڰl(f��)�͠�B(t��i)��
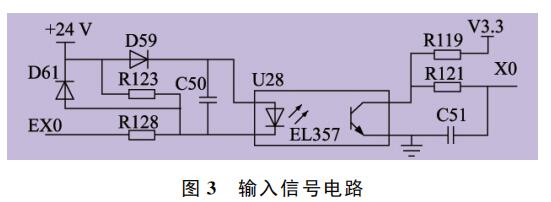
������ݔ��ݔ����
ݔ����̖�·��D3��ʾ���ţ�0�鲣����ҺλӋģ�K�O(sh��)Ӌ���_�P(gu��n)��ݔ����̖�ˡ��ţ�0ݔ����̖��(j��ng)�^�·̎���a(ch��n)��ݔ����̖��0����0�ӣ��ңͣӣԣ�3����407оƬ�����_���鲣����ҺλӋģ�K�O(sh��)Ӌ��(n��i)�������ṩݔ����̖�����ãţ�357оƬ����ⲿ�O(sh��)��ݔ����̖�c���ңͣӣԣ�3����407оƬ�ӿ���̖֮�g�ĸ��x�����ģ�K�Ŀ��ɔ_������
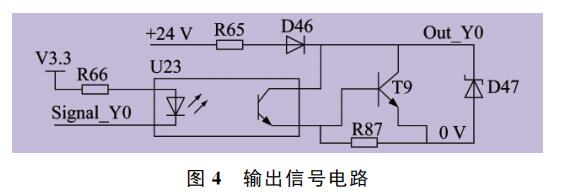
�� ݔ����̖�·��D4��ʾ���ӣ������0����ңͣӣԣ�3����407оƬ���_���a(ch��n)����ݔ����̖���ӣ������0��̖��(j��ng)�^�·̎����׃?y��u)�ϣ����?��̖���ϣ�����0��̖�B��ݔ���(q��)���·���a(ch��n)�����H��ݔ��������̖��ݔ����Ҳ���ãţ�357оƬ�M����̖���x��
����3 �����}�_��̖
���O(sh��)Ӌ�IJ�����ҺλӋģ�K�O(sh��)Ӌ��������}�_��ֱ̖���ɣ��ңͣӣԣ�3����407оƬ���ɣ�ͨ�^�Ӿ������c�ⲿ�·���B��
3 ͨ�ŷ�ʽ
�@һ������ҺλӋģ�K�O(sh��)Ӌ���ڣͣ������f(xi��)�h���h(yu��n)�̽K�ˣ��ңԣգ�ģʽ�O(sh��)Ӌ�����͑���ģʽ�M�й�������λ�C�����|���������ؙC�ȣ����l(f��)��0��0����0��04ָ�ʹݔ��˿ڣ��ض˿ڣ���ݔ���˿ڣ��ٶ˿ڣ��Ġ�B(t��i)��(sh��)��(j��)��������λ�C����λ�CҲ����ʹ��0��05��0��0����0��0�ƺ�0�أ�0ָ��F(xi��n)ݔ���˿�ͨ����ƺ�ģ�K��(n��i)���Ĵ�����(sh��)��(j��)�O(sh��)�����ܡ���λ�C�cģ�K֮�g�Ĕ�(sh��)��(j��)ͨ�Ų��ô���ͨ���Ӱl(f��)��(sh��)��(j��)���팍�F(xi��n)��ÿһ��ָ����ض��ķ��ϣͣ������f(xi��)�h�Ĕ�(sh��)��(j��)����ʽ����(sh��)��(j��)�����ãȣ�����a��
4 ܛ���O(sh��)Ӌ
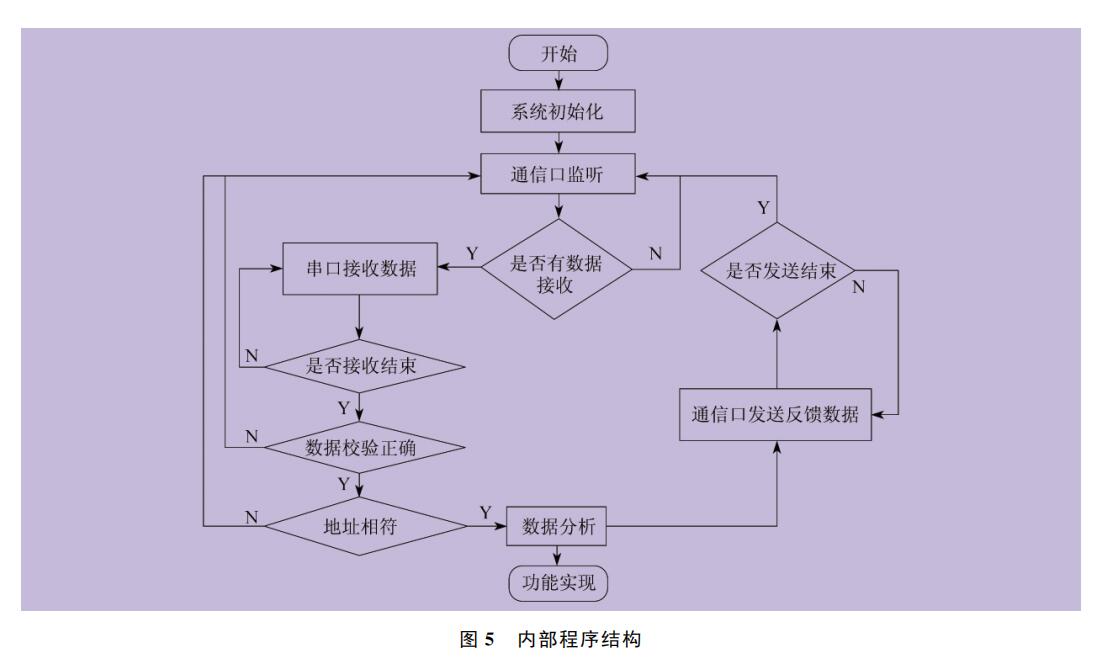
���O(sh��)Ӌ�IJ�����ҺλӋģ�K�O(sh��)Ӌ�����(n��i)��������Է֞��IJ���———ϵ�y(t��ng)��ʼ������(sh��)��(j��)���ա���(sh��)��(j��)�����c��(zh��)�С���(sh��)��(j��)����������ϵ�y(t��ng)��ʼ�������˿ڳ�ʼ����ͨ�ſڳ�ʼ����5��7�ݡ�
������(n��i)������Y(ji��)��(g��u)��D5��ʾ��
����ģ�Kͨ늺��Ԅ��M��ϵ�y(t��ng)��ʼ������ʼ�����ңͣӣԣ�3����407оƬ�����_��B(t��i)���xȡоƬ�惦��(sh��)��(j��)���֏�(f��)��ǰһ�Δ��ǰ��B(t��i)��ͬ�r���ģ�K��ͨ�Ņ���(sh��)�O(sh��)�ã��猢��ݔ�����O(sh��)�Þ飱����00��������ȣ����_ʼ�B�m(x��)�O(ji��n) ͨ�ſڣ��ȴ���λ�C�l(f��)�Ϳ���ָ���(d��ng)��λ�C�l(f��)�Ϳ���ָ�(sh��)��(j��)����ģ�K�xȡ��(sh��)��(j��)�������Ք�(sh��)��(j��)����ͨ�^ѭ�h(hu��n)����У�a�Д���(sh��)��(j��)�Ƿ���Ч������oЧ����ô����ͨ�ſڱO(ji��n) ��B(t��i)��������Ք�(sh��)��(j��)��Ч����ô����(sh��)��(j��)�ĵ�ַ�M���Дࡣ����l(f��)�́��ĵ�ַ�cģ�K�O(sh��)�õĵ�ַ����ͬ����ô����ͨ�ſڱO(ji��n) ��B(t��i)������l(f��)�́��ĵ�ַ�cģ�K�O(sh��)�õĵ�ַ��ͬ����ôģ�K����?q��)��l(f��)�́��Ĕ�(sh��)��(j��)���M�Д�(sh��)��(j��)�����c��ȡ������ģ�K��(n��i)��оƬ��(n��i)���е�ָ��죬�����ȽY(ji��)����(zh��)������(y��ng)�Ĺ��ܡ���(zh��)�й�����ɺ�ģ�K����?q��)��?zh��)�нY(ji��)����(sh��)��(j��)ͨ�^ͨ�ſ��Ԕ�(sh��)��(j��)���ĸ�ʽ��������λ�C��
5 �yԇ
�ͣ������У�����һ�N���ڣͣ������f(xi��)�h�ķ���(w��)��ģ�M����8�ݣ�����������λ�C�yԇ���{(di��o)ԇ�͑��ˣ�֧���h(yu��n)�̽K��ģʽ��������Ϣ���Q��(bi��o)��(zh��n)�a���Լ���ݔ���ƅf(xi��)�h�;W(w��ng)�H�f(xi��)�h�ۣ��ݡ��P�ߌ��ͣ������У���������λ�C�����O(sh��)Ӌ�IJ�����ҺλӋģ�K�O(sh��)Ӌ�M�Мyԇ��ģ�K�Ӿ���D����ʾ��ͨ�^�@һ�Ӿ������Ԍ��F(xi��n)��·ݔ����̖�ɼ������g�^������ơ�
5���� ݔ��yԇ
���������Ƃ������������Ƃ�������̎�ڹ�����B(t��i)�r��ģ�K�ģ�0�˿ںͣأ��˿��и��ƽݔ�롣����أ����أ�5�˿ڶ�̎�ڵ��ƽ��B(t��i)���˕r��ʹ�ãͣ������У���ģԣ����ã���������ݔ�딵(sh��)��(j��)��0��0��000000��07���ã������У�0����ģ�K��ַ��0����ʾ�xȡ�ض˿ڠ�B(t��i)ָ�0000��ʾ�xȡ�˿���ʼ��ַ������0�˿ڵ�ַ��00��0��ʾһ�����xȡ����λ�ض˿ڠ�B(t��i)��7���ã���ѭ�h(hu��n)����У�a�ۣ�0�ݡ����յ����ϔ�(sh��)��(j��)����ģ�K�ڈ�(zh��)��0��0��ָ��ؔ�(sh��)��(j��)��0��0��0��03�£�48�����У�0����ģ�K��ַ��ǰһ��0����ʾ�ض˿ڠ�B(t��i)ָ���һ��0����ʾ�ɂ��ֹ�(ji��)��03��ʾ��0�ͣأ��˿�����̖���£�48��ѭ�h(hu��n)����У�a��
5���� ݔ���yԇ
ģ�K�������g�^����ˣ�����Ȧͨ늕r��ʹ�ãͣ������У���ģԣ����ã���������ݔ�딵(sh��)��(j��)��0��050000�ƣ�008��3������0�˿�ݔ�����ƽ������٣����٣��˿ڞ���ƽ��ģ�K���ؔ�(sh��)��(j��)��0��050000�ƣ�008��3�������صĔ�(sh��)��(j��)���У�0����ģ�K��ַ��05��ʾ��(zh��)��0��05ָ������Ɔ�ݔ���˿ڡ�0000��ʾ���ƶ˿ڞ��0������Ҫ���ƣ٣����t��(sh��)��(j��)����000����������ơ��ƣ�00��ʾ�O(sh��)�ö˿ڞ���ݔ���������Ҫ�O(sh��)�ö˿ڞ�oݔ�����t��(sh��)��(j��)����0000��8��3����ѭ�h(hu��n)����У�a����(zh��)�У�0ݔ��ָ������g�^����ˣ�����Ȧ��늣����|�c��B(t��i)�l(f��)����׃�����ģ�K���ƣˣ�����Ȧʧ늣��t���l(f��)�͵Ĕ�(sh��)��(j��)����0��0500000000�ãģã���
5��3 �����}�_����
��(d��ng)��Ҫ�и����}�_�r����λ�Cʹ��0��0����0�أ�0ָ���O(sh��)�Ô�(sh��)��(j��)���l(f��)�ͺͽ��Ք�(sh��)��(j��)���^���cʹ��0��0����0��05ָ���^����ƣ���̎����Ԕ����
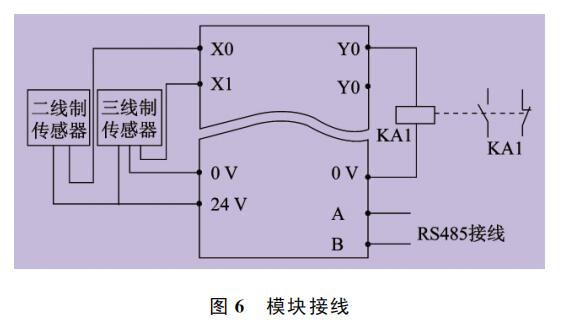
�� ��(y��ng)��
��(y��ng)�����O(sh��)Ӌ�IJ�����ҺλӋģ�K�O(sh��)Ӌ�M��ʮ�ֻ��_늚���ƣ�늚����ԭ����D7��ʾ�������O(sh��)Ӌ�IJ�����ҺλӋģ�K�O(sh��)Ӌ������Ŀ����������ɼ�ʮ�ֻ��_��������̖�����o��̖�����Ʋ��M�(q��)�������M����Ɍ����M늙C�Ŀ��ơ�ʮ�ֻ��_���S�����S��ǰ�����λ��������̖�cģ�K�ģ�0���أ����أ�����3ݔ��˿����B����ֹ���_�Cе�г̳��ޡ����ӣ����Ӱ��o�ͣ��ӣ�ֹͣ���o�cģ�K�ģأ������أ�7ݔ��˿����B����ģ�K�ṩ���Ӻ�ֹͣ��̖��ģ�K�ģ�0ݔ���˿��cʮ�ֻ��_���S���M�(q��)�����ģţΣ������B�������S���M�(q��)����������ģ�K�ģ٣�ݔ���˿��cʮ�ֻ��_���S���M�(q��)�����ģţΣ������B�����ƣ��S���M�(q��)����������ģ�K�ģ��ߣģɣҺͣ��ߣУգ̸����}�_ݔ���˿�����S���M�(q��)�����ṩ������̖�����F(xi��n)ʮ�ֻ��_���S���\�ӿ��ơ�ģ�K�ģģߣģɣҺͣģߣУգ̸����}�_ݔ���˿�����S���M�(q��)�����ṩ������̖�����F(xi��n)ʮ�ֻ��_���S���\�ӿ��ơ�ģ�K���Ѓ�·�ң�48��ͨ�ſ�����һ·�c�|�������B��ͨ�^�|�����������O(sh��)�ò��M�(q��)�����ģ��S�����S�г̣����r�@ʾ���S�ͣ��Sǰ��˂�������B(t��i)��늙C�\�о��x���\�дΔ�(sh��)�ȅ���(sh��)��ͨ�^�|�����ϵĆ��Ӻ�ֹͣ���o���܉����ʮ�ֻ��_���Ӻ�ֹͣ����һ·�ң�48��ͨ�ſ������c�����O(sh��)�����B�����ڌ��F(xi��n)���ܔUչ��
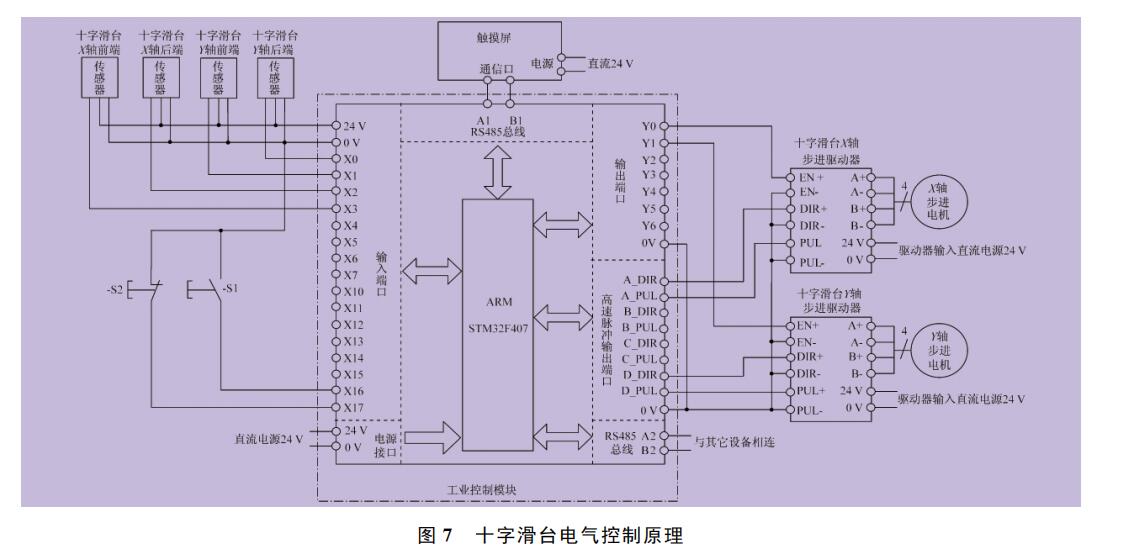
���M��ʮ�ֻ��_늚���ƕr���c���|�����ϵĆ��Ӱ��o���£��ӣ����o��������ҺλӋģ�K�O(sh��)Ӌ����(j��)�|�����O(sh��)����܉�E�����Ɔ����M�(q��)������f(xi��)�{(di��o)���ƃɂ����M�(q��)�������F(xi��n)ʮ�ֻ��_�ď�(f��)�s܉�E�\�С��c���|�����ϵ�ֹͣ���o���£��ӣ����o��������ҺλӋģ�K�O(sh��)Ӌͨ�^��(n��i)������ʹʮ�ֻ��_ֹͣ�\�С�
7 �Y(ji��)���Z
�P�ߑ�(y��ng)�ã��ңͣӣԣ�3����4��7оƬ�����ڣͣ������f(xi��)�h�O(sh��)Ӌ��һ�N������ҺλӋģ�K�O(sh��)Ӌ�����ңͣӣԣ�3����4��7оƬ���Џ����߉�\��������ͨ�^������ͬ�����ܿ��ٌ��F(xi��n)�����cݔ��֮�g��(f��)�s��߉���ƣ��m�����^�韩���Ŀ��ƈ��ϡ�ͨ�^ʮ�ֻ��_늚���Ƒ�(y��ng)�ð����������_�J(r��n)���O(sh��)Ӌ�IJ�����ҺλӋģ�K�O(sh��)Ӌ�����^�ߵČ��Ãrֵ��